多光谱机载LiDAR(multi-spectral airborne Light Detection And Ranging (LiDAR))系统能够同时获取地物表面几何和光谱数据。目前,多光谱机载LiDAR系统已成为一种快速获取大范围空间数据的有效手段,为地形测绘、土地覆盖类型分类、无缝浅水测深,环境建模、森林调查和植被类型分类、自然资源管理、灾害响应等提供数据支持。但多光谱点云数据所描述的自然场景均具有数据量大、真三维、高冗余、非结构化、采样粒度分布严重不均以及不完整等典型特点,其特征分析、信息提取方面还严重依赖于先验知识。大场景多光谱三维点云数据的非结构化、高点密度、高光谱冗余、海量特性导致目标语义特征表达能力不足,以及时间复杂度较高或算法的计算效率较低;且目前点云数据采样成本高、样本稀少且不易获取等因素导致算法泛化能力弱。因此,提出了一种共享卷积语义查询网络(SCSQ-Net)弱监督模型。算法利用共享核点卷积(SKPC)主干,在编码和语义推理过程中整合邻域信息;并引入适应dropout激活(ADA)模块,进一步增强整个点云场景的激活和特征学习。
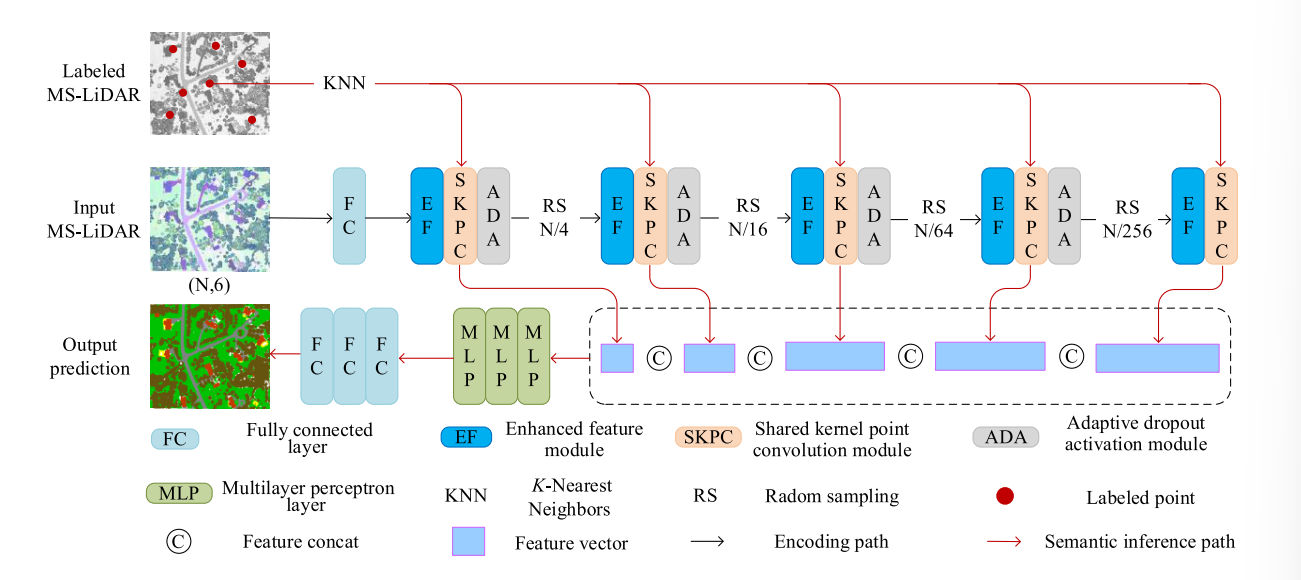
多光谱激光点云SCSQ-Net弱监督语义分割方法技术路线图
