城市数字化转型和智慧化发展依赖于对城市环境的精确了解和实时监控,这需要高精度的数据来支持决策和规划。车载移动激光扫描系统具有采集速度快、定位精度高、抗干扰能力强以及信息丰富等优势,能快速获取大规模高质量的三维点云数据,对城市场景进行细致表达。然而,相较于车载移动激光扫描硬件设备的快速发展,目前基于车载移动激光扫描点云数据的语义分割技术无法完全满足应用需求。然而,基于深度学习的车载移动激光扫描点云语义分割方法仍面临一些问题,局部上下文特征表达能力不足且标记样本缺乏等问题。
针对全监督语义分割方法严重依赖大量精准标记点进行模型训练的问题,提出了基于集成预测的多分支弱监督语义分割方法。方法在所提全监督网络的基础上,通过记录训练预测值生成的集成预测,提出一个基于集成预测的多分支弱监督模块,充分利用未标记点属性信息,并缓解弱监督模型过拟合问题。该模块先利用集成预测约束分支一致性约束集成预测和点云预测的差异,增强点云特征表达;然后提出对比引导的熵正则化分支,利用集成预测值进行非置信预测点筛选,再通过增加该点集预测的熵值,缓解弱监督模型过拟合;最后提出的自适应伪标记学习分支以集成预测值作为伪标记,利用预测差异自适应调整伪标记学习的权重,为模型训练提供额外的监督信号。
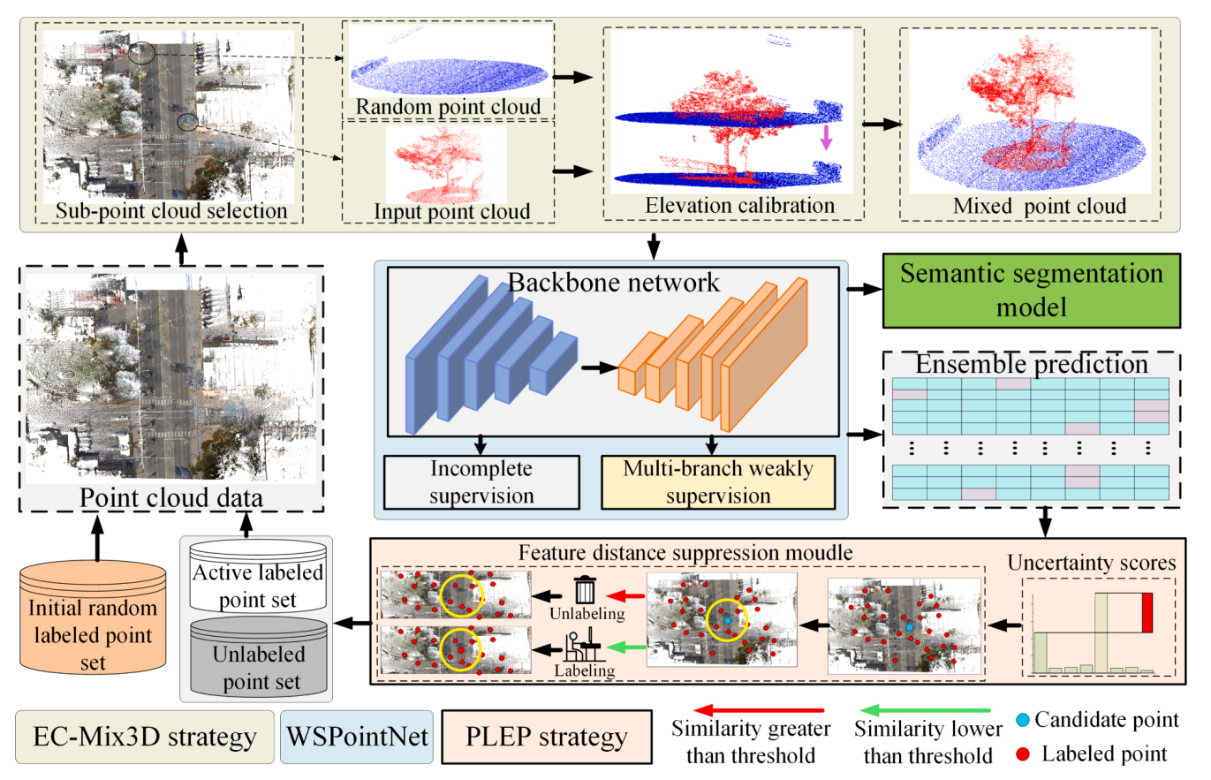
基于集成预测的移动激光点云多分支弱监督语义分割方法技术路线图
